Cấu tạo và nguyên lý hoạt động của Động cơ Servo
- Thứ ba - 18/05/2021 10:21
- In ra
- Đóng cửa sổ này
Phân loại động cơ servo
Hiện nay trên thị trường có 2 loại động cơ servo : DC servo và AC servo
♦ Động cơ DC servo là một loại động cơ DC (động cơ chạy điện DC) có gắn thiết bị phản hồi tốc độ và vị trí (Encoder) . Khi điều khiển động cơ DC servo ta không nhất thiết phải sử dụng Driver của nhà sản xuất. Ta có thể tự thiết kế bộ điều khiển riêng theo yêu cầu của người dùng

♦ Động cơ AC servo là một loại động cơ AC ( động cơ chạy điện AC ) có gắn Encoder để phản hồi tốc độ và vị trí của động cơ. Khi điều khiển động cơ AC servo ta bắt buộc phải sử dụng bộ điều khiển đi kèm. Hiện nay AC servo được sử dụng phổ biến hơn DC servo do có các ưu điểm sau : Độ chính xác cao, momen xoắn lớn, điều khiển đơn giản…

Cấu tạo động cơ servo
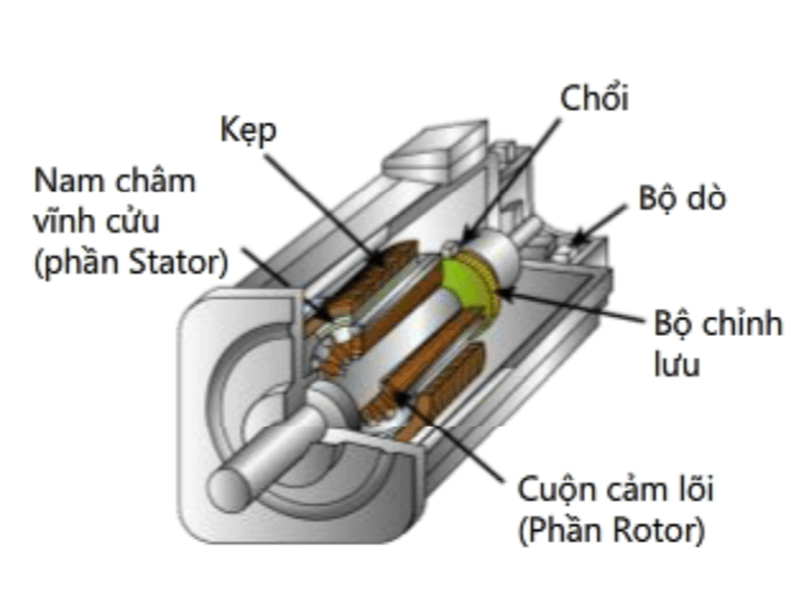
Cấu tạo chung của động cơ DC và AC servo bao gồm 3 phần: stator, rotor (thường là loại nam châm vĩnh cửu) và encoder.
- Stator bao gồm một cuộn dây được quấn quanh lõi, được cấp nguồn để cung cấp lực cần thiết làm quay rotor.
- Rotor được cấu tạo bởi nam châm vĩnh cửu có từ trường mạnh.
- Encoder được gắn sau đuôi động cơ để phản hồi chính xác tốc độ và vị trí của động cơ về bộ điều khiển. Hiện nay encoder sử dụng cho AC servo là encoder tuyệt đối với độ chính xác có thể lên đến 23 bit (tức là hơn 8 triệu xung / vòng quay)
Nguyên lý hoạt động và phương pháp điều khiển động cơ servo
Nguyên lý điều khiển của DC servo
Để điều khiển động cơ DC servo ta sử dụng điện áp một chiều. Khi động cơ quay luôn có tín hiệu phản hồi tốc độ và tọa độ của động cơ về bộ điều khiển. Khi muốn động cơ chuyển động ta chỉ cần cấp một điện áp vào hai đầu của dây động lực. Khi ta muốn điều chỉnh tốc độ của đông cơ, ta thay đổi điện áp đặt vào động cơ. Nếu muốn tăng tốc ta tăng điện áp, muốn giảm tốc ta giảm điện áp. Để điều khiển tốc độ động cơ DC servo ta sử dụng phương pháp PWM.
Nguyên lý điều khiển của AC servo
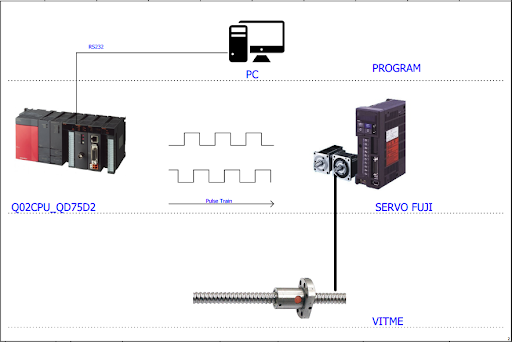
Để điều khiển động cơ AC servo ta phải sử dụng một bộ điều khiển (Driver) đi kèm động cơ. Khi điều khiển động cơ ta cấp tín hiệu từ PLC (hoặc bộ điều khiển) cho driver . Sau đó driver xuất các tín hiệu điều khiển tốc độ, tọa độ, mô- men… đến động cơ. Người sử dụng servo chỉ quan tâm đến cách ta xuất tín hiệu cho drvier chứ ta không cần can thiệp vào tín hiệu mà driver điều khiển động cơ. Nói đến cách điều khiển động cơ servo là nói đến cách ta đưa tín hiệu vào bộ driver. Việc lựa chọn phương pháp điều khiển động cơ servo còn phụ thuộc vào việc ta sử dụng chức năng nào của servo. Servo có 3 chức năng chính như sau :
♦ Điều khiển vị trí : Khi sử dụng chức năng này, ta dùng phương pháp xuất xung PTO để điều khiển
♦ Điều khiển tốc độ : Khi sử dụng chức năng này ta dùng tín hiệu analog để điều khiển
♦ Điều khiển mô-men : Khi sử dụng chức năng này ta cũng dùng tín hiệu analog