TRƯỜNG ĐẠI HỌC SAO ĐỎ - CƠ SỞ GIÁO DỤC THEO ĐỊNH HƯỚNG ỨNG DỤNG
CHẤT LƯỢNG TOÀN DIỆN - HỢP TÁC SÂU RỘNG - PHÁT TRIỂN BỀN VỮNG
Khoa Điện - Trường Đại học Sao Đỏ










Ứng dụng công cụ Sistool thiết kế bộ hiệu chỉnh hệ số điều khiển tự động bằng phương pháp quỹ đạo nghiệm số
- 16/03/2021 12:12:00 AM
- Đã xem: 2536
Một hệ thống điều khiển trước khi đưa vào hoạt động cần đánh giá được các trạng thái là hệ thống ổn, hệ thống không ổn định hay hệ thống ở biên giới ổn định. Có thể đánh giá hệ thống thông qua đặc điểm của các tập hợp nghiệm của phương trình đặc trưng. Chính vì vậy tác giả đã sử dụng công cụ Sisotool để thiết kế bộ hiệu chỉnh hệ thống điều khiển tự động bằng phương pháp quỹ đạo nghiệm số.
Tổng quan về truyền thông Modbus
- 11/03/2021 09:36:00 AM
- Đã xem: 2366
Giao thức Modbus, Chắc hẳn các bạn cũng đã từng nghe qua. Vậy giao thức modbus là gì? Ứng dụng gì trong cuộc sống nói chung và trong ngành công nghiệp tự động nói riêng. Chúng ta hưởng lợi gì từ Modbus, nó có giống các giao thức truyền thông khác không
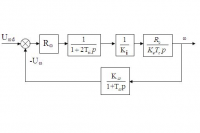
XÂY DỰNG MÔ HÌNH HỆ TRUYỀN ĐỘNG ĐIỆN ĐỘNG CƠ MỘT CHIỀU TRÊN PHẦN MỀM MATLAB
- 10/03/2021 09:36:00 AM
- Đã xem: 1227

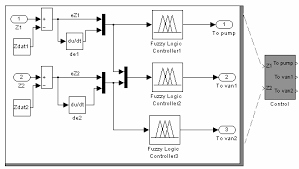
Thiết kế, mô phỏng hoạt động của hệ thống sấy nông sản trên máy tính sử dụng PLC S7-1200
- 02/03/2021 09:36:00 AM
- Đã xem: 1539


Khoa Điện tỏ chức thi sinh viên giỏi cấp trường năm 2020 tại doanh nghiệp
- 06/01/2021 10:11:57 AM
- Đã xem: 2369
Nhằm kiểm tra tay nghề sinh viên viên. Khoa Điện phối hợp công ty cổ phần Nhiệt điện Phả Lại tổ chức thi sinh viên giỏi năm học 2020 - 2021 với nội dung: Thiết kế, lắp đặt mạch điện bảo vệ phụ tải 1 pha, 3 pha.
HỆ THỐNG CHIẾU SÁNG CÔNG CỘNG BẰNG PLC S7 – 1200
- 27/10/2020 09:27:00 AM
- Đã xem: 2010
Tại các nước phát triển, điện năng cho chiếu sáng công cộng chiếm 13% tổng điện năng tiêu thụ. Hệ thống chiếu sáng đô thị bao gồm nhiều thành phần khác nhau, trong đó có thể kể đến phục vụ giao thông, chiếu sáng các cơ quan chức năng của đô thị. Chiếu sáng đường phố tạo ra sự sống năng động, hấp dẫn góp phần nâng cao chất lượng cuộc sống cho người dân.