TRƯỜNG ĐẠI HỌC SAO ĐỎ - CƠ SỞ GIÁO DỤC THEO ĐỊNH HƯỚNG ỨNG DỤNG
CHẤT LƯỢNG TOÀN DIỆN - HỢP TÁC SÂU RỘNG - PHÁT TRIỂN BỀN VỮNG
Khoa Điện - Trường Đại học Sao Đỏ









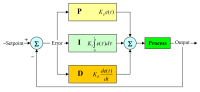
BỘ ĐIỀU KHIỂN PID VÀ PHƯƠNG PHÁP NHẬN DẠNG MÔ HÌNH HỆ KÍN
05:31 12/07/2020
Bộ điều khiển PID chiếm giữ vai trò quan trọng trong các ứng dụng thực tế. Đã có nhiều phương pháp chỉnh định PID được đưa ra, tuy nhiên phần lớn các phương pháp yêu cầu sử dụng trực tiếp mô hình đối tượng. Trong nghiên cứu này ta áp dụng phương pháp nhận dạng mô hình hệ kín, từ đó chỉnh định bộ điều khiển PID trong vòng kín.
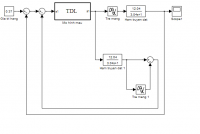
Ứng dụng mô hình dự báo Smith bù trễ truyền thông cho các hệ thống điều khiển qua mạng
11:46 11/05/2020
Các hệ thống điều khiển trong công nghiệp đều có yêu cầu về tính thời gian thực. Hệ thống điều khiển phân tán do vậy cũng phải đáp ứng yêu cầu này khi sử dụng để điều khiển các quá trình công nghệ.

![[HOABINH HB] TUYỂN DỤNG NHÂN SỰ CƠ ĐIỆN (MEP) & GIÁM...](/assets/news/2026_04/671222404_1257124906546140_7141448073872586012_n.jpg)


